sea2future
USV - enautica1
Descobrir
Eventos
A embarcação USV-enautica1 estará exposta em dois eventos que se realizarão em outubro, são eles:
 • Noite Europeia de Investigadores que irá decorrer no próximo dia 24 de setembro na Marina de Oeiras.
• Noite Europeia de Investigadores que irá decorrer no próximo dia 24 de setembro na Marina de Oeiras.
 • Festival Internacional de Ciência que irá decorrer entre 12 e 17 de outubro no Palácio e Jardins do Marquês de Pombal.
• Festival Internacional de Ciência que irá decorrer entre 12 e 17 de outubro no Palácio e Jardins do Marquês de Pombal.
Linha sea2future
O sea2future é uma linha de projetos do Centro de Investigação e Desenvolvimento (CID) da Escola Superior Náutica Infante D. Henrique (ENIDH) que visa a I&D em robótica marítima aplicada. Os projetos desenvolvem-se em torno das mais diversas embarcações não tripuladas autónomas USV (Unmanned Surface Vehicle) e aplicações marítimas.
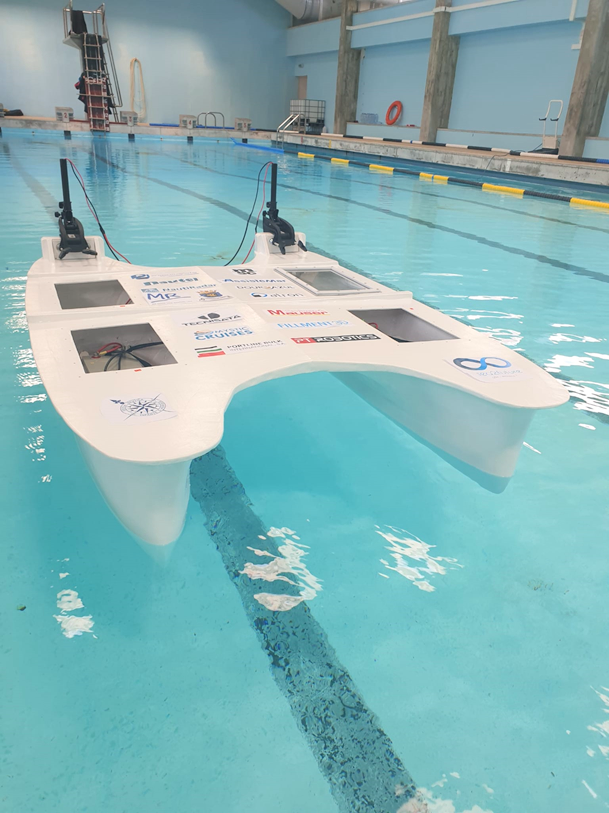
Embarcação USV-enautica1
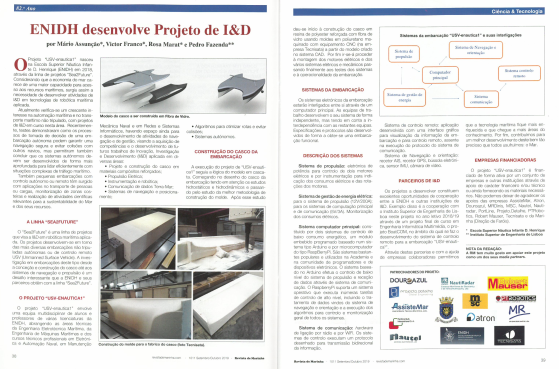
O Projeto USV-enautica1 nasce em 2018 com o intuito de desenvolver atividades de I&D em tecnologias de robótica marítima aplicada com a construção de uma embarcação autonoma multifacetada. Este projecto conta com a participação dos alunos da Licenciatura de Engenharia de Máquinas Marítimas (LEMM), Licenciatura de Engenharia Eletrotécnica Marítima (LEEM), dos TeSP em Eletrónica e Automação Naval e Manutenção Mecânica Naval e do Clube de Robótica da ENIDH.
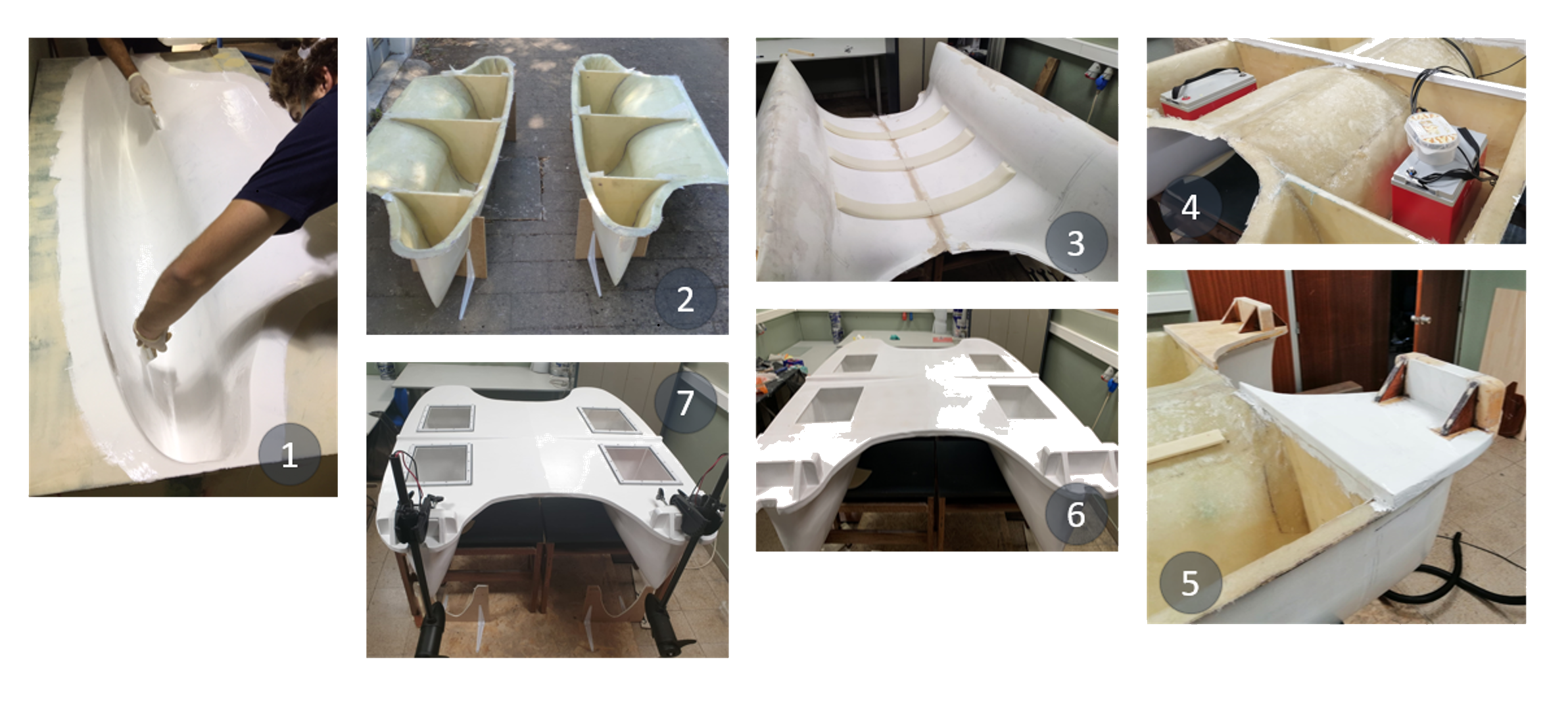
• Projeto e construção do casco em materiais compósitos reforçados;
• Propulsão elétrica;Instrumentação e robótica;
• Comunicações de dados Terra-Mar;
• Sistemas de navegação e posicionamento;
• Algoritmos para otimizar rotas e evitar colisões;
• Embarcações com sistemas autónomos;
• Visão computacional com recurso a algoritmos de inteligencia artificial.
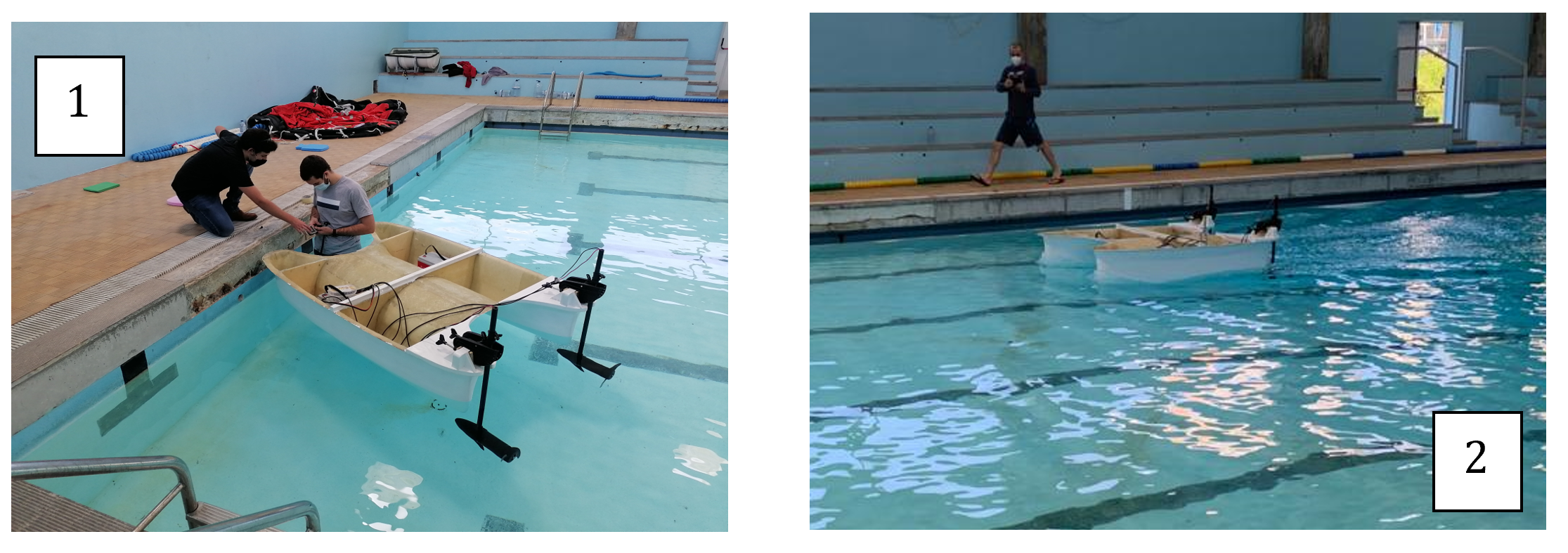
Em março de 2021 foram realizados os testes de propulsão e do comando remoto (1). Foi testada a manobrabilidade da embarcação tendo-se verificado um comportamento bastante suave e consistente nas operações de marcha avante, marcha à ré e nas manobras da embarcação com os dois motores elétricos (2). A velocidade máxima alcançada foi de 3 nós.
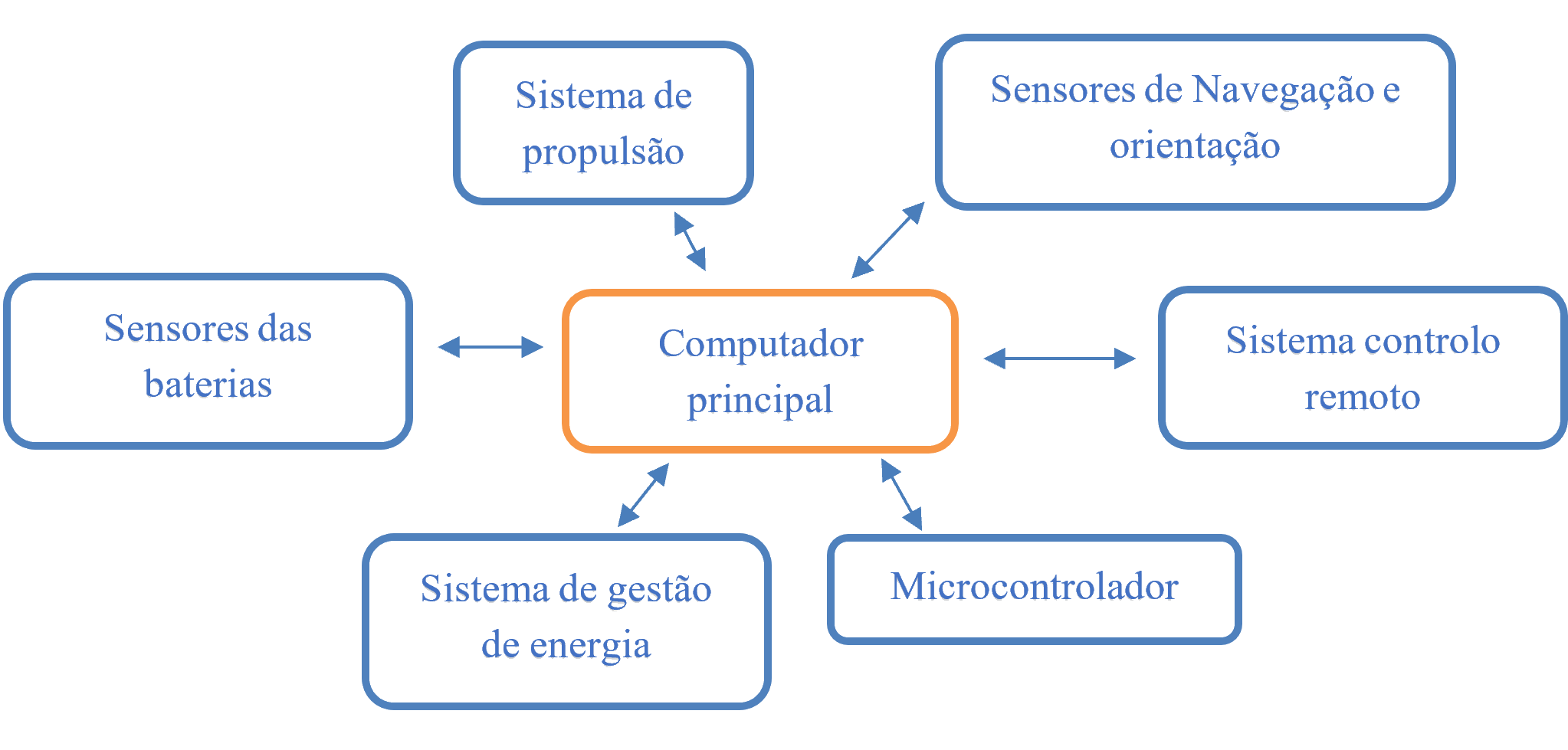
• Sistema computador principal: Tem por base um microcomputador RaspBerryPi Neste computador funciona um servidor Robot Operation System (ROS) que permite uma fácil gestão da comunicação de dados entre os sistemas ligados ao computador.
• Sensores de navegação e orientação: Atualmente composto por recetor AIS (Automatic Identification System), recetor GPS (Global Position System) e sensor IMU (Inertial Measurement Unit).
• Sensores das baterias: Compostos por dois sensores de tensão, dois sensores de intensidade de corrente e quatro sensores de temperatura, para medir o comportamento elétrico e físico das baterias.
• Sistema de propulsão: Constituído por uma placa controladora de motores com dois canais (RoboClaw 2x60A) e dois motores de 250 N cada. O acionamento dos motores é feito por ligação USB ao computador principal, ou por controlo de rádio.
• Sistema de controlo remoto: Foram desenvolvidas duas aplicações para o controlo remoto da embarcação. Uma delas funciona num computador portátil e a outra realiza-se num smartphone. Ambas as soluções permitem visualizar os dados de telemetria da embarcação e o acionamento remoto do sistema de propulsão.
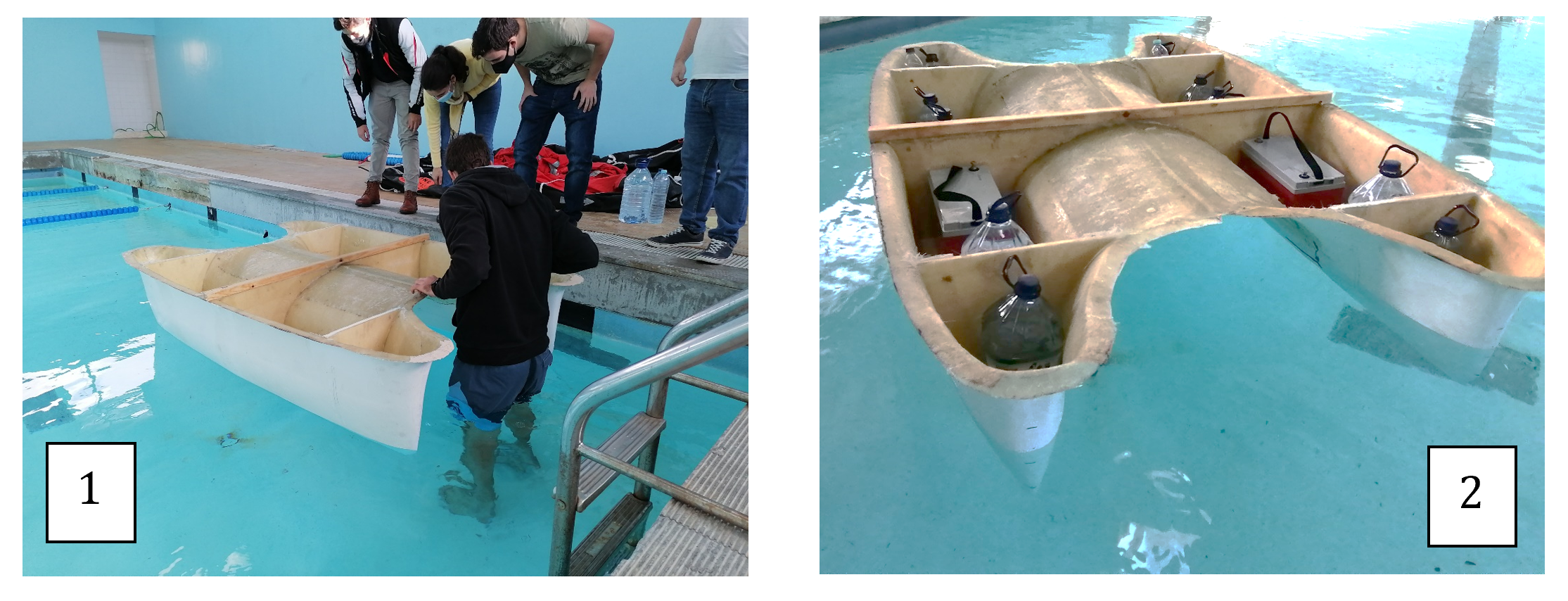
• Sistema de gestão de energia elétrica: A energia elétrica disponível a bordo é disponibilizada através de duas baterias de 12 V e 100 Ah. Está ainda em desenvolvimento este sistema que fará uso dos sensores das baterias para obter o estado de carga das mesmas e assim indicar a energia disponível.
• Sistema microcontrolador: Pretende-se que o sistema baseado num microcontrolador efetue o controlo de baixo nível do hardware usado pela embarcação.
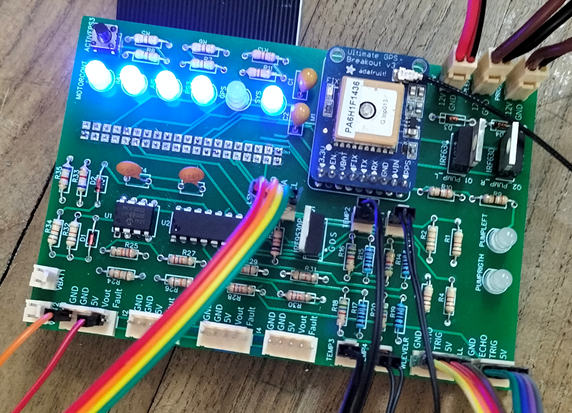
• Fichas de ligação dos sensores para a fácil ligação ou substituição;
• Circuitos elétricos para condicionamento de sinal dos vários sensores;
• Circuito integrados para conversão analógica-digital;
• Circuitos eletrónicos para acionamentos das bombas de fundo do casco;
• Fichas de ligação das bombas de água;
• Luzes LED indicadoras de cada sistema;
• Ficha para o “flat-cable” de ligação ao computador principal.
• O projeto “Boat Communication - BoatCOM”, no âmbito do qual foi realizado o desenvolvimento do sistema de controlo remoto para a embarcação USV-enautica1.
• O projeto “Android BoatCOM”, onde foi desenvolvida uma aplicação móvel para dispositivos Android, de forma a existir uma leitura dos dados da telemetria recebidos da embarcação, tal como o controlo da mesma através de um joystick virtual;
• O projeto “Sistemas de Bases Dados de Navegação – Sea2Future”, sistema de recolha e armazenamento dos dados dos sensores numa base de dados para a Cloud. No contexto deste projeto foi igualmente desenvolvida uma aplicação web que permite a posterior análise das missões realizadas pela embarcação. .
• O projeto “Virtualização da embarcação USV-enautica1", que consiste na virtualização, rendering e simulação da embarcação, através da integração de: ferramentas de ambiente gráfico; sensores inerciais (IMU); e da simulação física de fluídos SPH (Smoothed Particle Hydrodynamics);
• O projeto “Design de firmware de controlo da embarcação marítima USV-enautica1”, que consiste em desenvolver um sistema para monitorizar e gerir o hardware dos sistemas da embarcação USV-enautica1.
• O projeto “Design the BMS for an Autonomous Small Vessel”;
• O projeto “Design of the Electric Powertrain System of a Fully Autonomous Small Vessel”
Parceiros
O projeto USV-enautica1 é financiado de forma ativa por um conjunto de empresas e outras instituições através de apoio de carácter financeiro e/ou técnico ou ainda fornecendo os materiais necessários ao projeto. Não podemos deixar de agradecer os apoios das empresas: AssisteMar; Atron; Direção de Faróis; Douroazul; Fillment3D; MRDinis; MSC; Nautel; Nautiradar; PortLine; Projeto.Detalhe; PTRobotics; Robert Mauser e Tecnisata.

Media




Contacto
Escola Superior Náutica Infante D. Henrique
Av. Engenheiro Bonneville Franco
2770-058 Paço de Arcos
email:sea2future@enautica.pt

Galeria
































All rights Reserved © SEA2FUTURE, 2021
Template: ThemeWagon